|
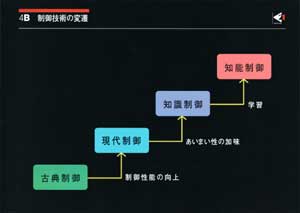
図は、制御理論の発展の段階を整理したものである。
1868年マックスウェル(Maxwell)が、蒸気機関の回転速度を一定に保つ調速機の機能を、理論的に解析したのが制御理論の始まりである。
古典制御理論は、1940年代から1950年代にかけて整備された。制御理論では、制御対象プロセスの入力と出力の関係を数式モデル化することから始まるが、古典制御理論は1入力、1出力に取り扱いが限定される。しかし、古典制御理論にもとづいて、比例制御、積分制御、微分制御の可能なPID調節計という汎用の制御機器が工業的に大量生産され、多くのプロセスやプラントに実用された。
その後、多入力、多出力の多変数制御系を取り扱う現代制御理論の分野が発達した。古典制御理論や現代制御理論にもとづく制御では、制御対象プロセスの正確な数式モデルの作成が前提となる。数式モデルが正確であれば、期待する性能が得られ、制御結果も定量的に評価できる。しかし、非線形性が強い制御対象では、数式モデルを決定するにも、実験で求めなければならないパラメーターが多くなるなど、高精度な数式モデルの作成が困難になり、効果に限界が生じる。
最近では、あいまい性を取り扱うファジィ理論、専門家の知識を活用するエキスパートシステム、およびパターン認識や学習効果に威力を発揮するニューラルネットワークなどの進歩が著しい。これらは知的情報処理技術といわれ、各種の問題解決システムの有効な手段となりつつある。
これらの成果をとり入れることによって発達した制御理論は、その考え方や手法が、製品の製造という分野に止まらず、生産計画、在庫、物流など人、物、情報に関係するあらゆる問題に応用できることがわかってきた。
鉄鋼業における制御理論の適用は、ひとつの機械・装置を制御することから始まって、いくつかの装置がつながった製造ライン、プロセスの制御へと進み、さらに多くのラインを擁する製鉄所全体の操業を最適化するという方向に進んでいる。今後は本社機能を含めた会社全体を対象にした最適化や、営業、製品の配送のルートでつながっている顧客を含めた最適化制御へと発展していく方向にある。
|